vsTASKER was used for underwater mission using unmanned autonomous vehicle.
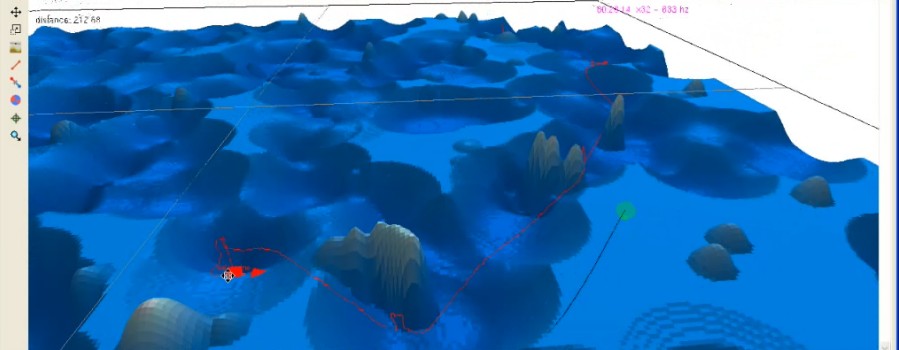
The purpose of the simulation was to test the embedded navigation system (logic) based on sea floor map analysis and runtime sonar input (simulated). The drone had to find its way towards a given target by avoiding getting too close to the surface (and being detected) while computing an interception path constantly actualized by the sonar information.
User can create its own sea bed using vsTASKER elevation editor to test some specific settings. Various configurations were used and thousand of runs triggered to validate the models on various sea beds.
In this demo:
- vsTASKER GUI in perspective mode
- Specific dynamic model for the AUV
- User definable sea bed