Against a remote controlled or self operated intruder (like a UAV), an efficient and cost effective way to intercept and destroy such threat is by using another remote controlled or self operated flying device, such as a kamikaze drone.
When several intruders are coming at the same time, and to increase the interception effectiveness, a swarm of explosive drones may provide better result at still a low cost. In the following example, we are testing two strategies against a threat consisting of a wave of several UAV bombers.
- Drone swarm remote controlled from a radar position
- Swarm using data-link and onboard sensors to share targets
Scenario Description
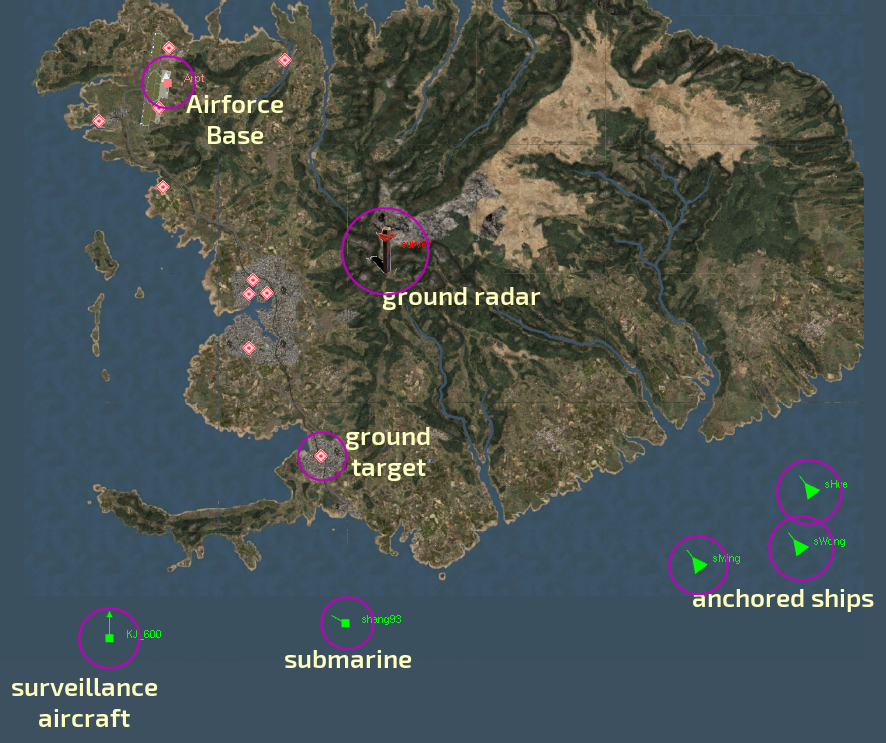
A surveillance aircraft is flying over the island. Whenever a target (missile launcher) is detected by the mounted radar, the aircraft sends the information to one of the three ships anchoring at a few kilometers from the coast.
Upon target position reception, the ship sends two UAV bombers and computes for each the best trajectory to reach the target according to the opponent radar coverage and the terrain profile. The UAV then follows terrain at 40m height to keep unnoticed.
Eventually, the ground radar detects the intruding UAVs and informs the Airforce base located on the north of the island. A swarm of 30 drones is launched, under the control of the radar which distributes drones against intruders.
Each drone is capable of flying above the terrain autonomously. In close vicinity of the UAV, it explodes, damaging the target with projectiles and a choc wave.
In the second scenario, the surveillance aircraft detects the swarm and inform the submarine which destroys the radar using a cruise missile. As soon as the radar data link is lost, drones are switching on their embedded sensors and start sharing between themselves every detected targets. According to several criteria, drones automatically reassign themselves to the best target around.
Conclusion
When remote controlled by the ground radar, all UAV bombers are intercepted and destroyed by the drones. By playing with probability of kill for each drone (according to distance or randomly) the shield effectiveness of the swarm can vary. As a drone can only be used once, against a armored or fast target, several might be needed to get through it.
Also, drones can only protect areas they can reach before the bombers. The earlier the detection of the UAV by the ground radar, the better the defense will be.
vsTASKER can take advantage of its batch mode to determine the optimal number of suicide drones to send according to a given attack configuration, or according to the physical type of threat. The same goes for the arrangement of drone swarms to best cover an area or respond to successive wave attacks.
The coordination of the drones once autonomous and relying only on the data exchanged inside the swarm, is crucial for effectiveness of the shield. Several algorithms must be tested and compared against others to get the most success on a given situation.
Thanks
- 3D is using OpenSceneGraph
- Ocean surface provided by Triton from Sundog
- Island terrain from TrianGraphics (old demo database)
- Some 3D models from VegaPrime