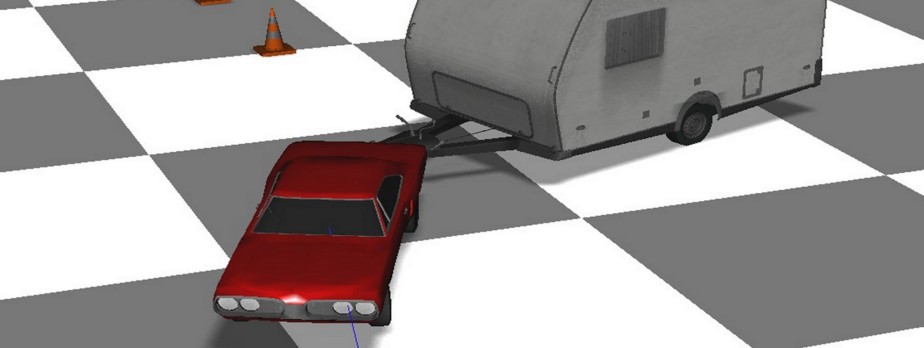
The purpose of this study is to create a set of rules for that an automaton can park a small or long trailer, hooked to a car or truck.
The proposed algorithm is based on three points that need to be well positioned and a set of control loops to replicate the driving skills.
Read the paper
The proposed algorithm is based on three points that need to be well positioned and a set of control loops to replicate the driving skills.
What was needed:
- OpenSceneGraph (engine and some programming knowledge)
- 3D models for the car, the caravan, the trailer and the truck
- vsTASKER with some knowledge of how to use it
- A bespoke Axle component for moving the chassis